Page content last modified on 2023-09-13.
CiThruS is UVG's virtual city simulation project. The name is short for "See-Through Sight," as it was originally created for testing a multi-camera system that would allow drivers to see through other cars in traffic. Since then, CiThruS has been generalized and developed in new directions to support other kinds of testing and simulation as well, such as various traffic-related systems, drone systems and vision-based systems.
There are two versions of CiThruS available. CiThruS2 is built on Unreal Engine and is the most up-to-date version of CiThruS. CiThruS1 was built on Unity Engine instead, and is no longer being developed. If you are interested in CiThruS, we strongly recommend choosing CiThruS2, as we will not be able to provide support for CiThruS1.
Please cite the following paper (or any from the publication section) for any usage of CiThruS:
E. Gałązka, A. Leppäaho, and J. Vanne, “CiThruS2: open-source virtual environment for simulating real-time drone operations and piloting,” in Proc. IEEE Int. Automated Vehicle Validation Conf., Austin, Texas, USA, Oct. 2023. [Tuni.fi] [PDF]
CiThruS2



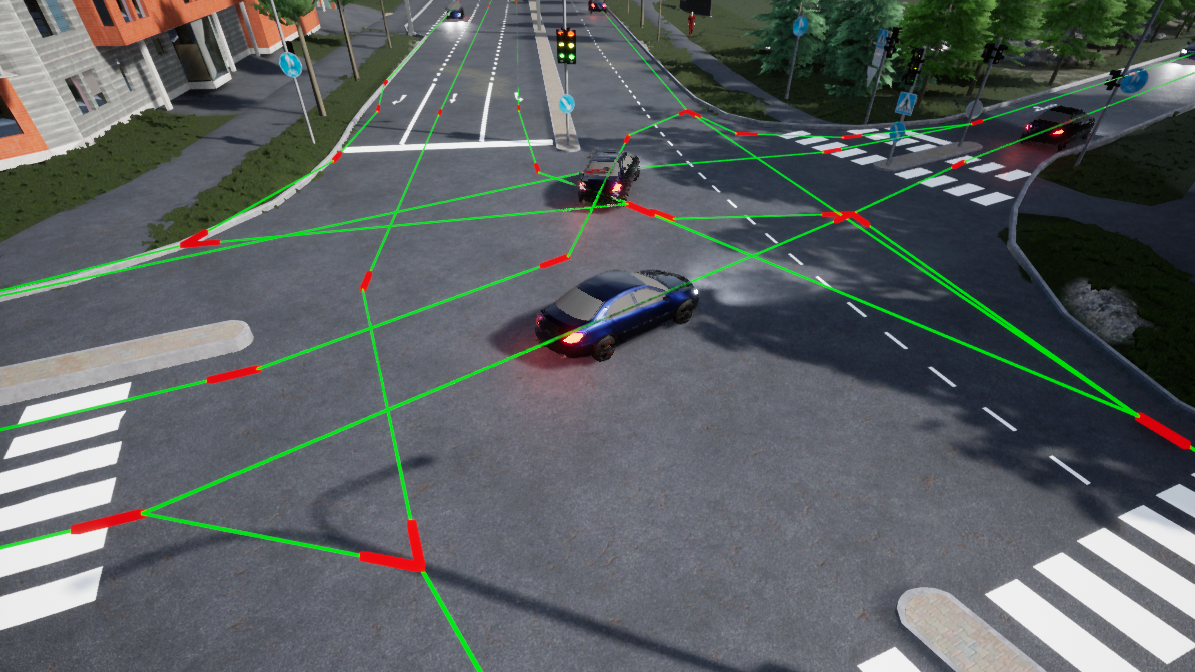
The CiThruS2 simulation framework is built on Unreal Engine 4. It improves upon the original CiThruS1 with a multitude of graphical improvements as well as entirely new features. The simulation environment is based on the real city of Hervanta, Finland. As such, it features realistic road infrastructure, buildings and vegetation. Large-scale traffic simulation is possible with hundreds of autonomously moving cars, pedestrians, trams and other traffic entities, and users can also control their own car or drone in the environment. Various visual time-of-day, weather and seasonal effects are available. Live 360 video can be captured and streamed from the environment, as well as basic automatically generated annotation data for computer vision. The simulator runs in real time on a consumer-grade laptop equipped with hardware such as an Intel Core i7 4-core CPU and an NVIDIA GTX 1060 GPU.
A visual overview of the CiThruS2 simulation environment can be seen in the following video:
| Quick info | |
|---|---|
| What? | Traffic imaging and simulation in a realistic virtual environment |
| Why? | Virtual testing of vehicles is safe and cheap |
| How? | Using Unreal Engine 4 and C++ |
| Features | |
|---|---|
| Traffic entities | Cars, pedestrians and trams that autonomously obey traffic rules |
| Customizable scenarios | For easily recreating specific conditions |
| Weather effects | Time-of-day lighting, rain, snow, fog |
| Lens effects | Raindrops, dust, dirt and lens distortion |
| Simulated cameras | Normal and 360 video available |
The development of CiThruS2 is ongoing and new improvements and features will be added over time. We are open to suggestions, as the future plans for CiThruS2 largely depend on what kind of interest there is and what kind of potential applications we are seeing.
CiThruS1
The original CiThruS1 framework was made with the Unity Engine and built on top of the free Windridge City environment by Nature Manufacture. This lightweight simulator was designed for 360-degree traffic imaging at arbitrary positions in the city. With the simulator, you can generate videos from any number of cameras placed anywhere in the scene simultaneously. The simulator can be run in real time on a consumer-grade laptop equipped, e.g., with an Intel Core i7 4-core CPU and NVIDIA GTX 1060 GPU.
Publications
CiThruS2
E. Gałązka, A. Leppäaho, and J. Vanne, “CiThruS2: open-source virtual environment for simulating real-time drone operations and piloting,” in Proc. IEEE Int. Automated Vehicle Validation Conf., Austin, Texas, USA, Oct. 2023. [Tuni.fi] [PDF]
E. Gałązka, T. T. Niemirepo, and J. Vanne, “CiThruS2: open-source photorealistic 3D framework for driving and traffic simulation in real time,” in Proc. IEEE Int. Conf. Intell. Transp. Syst., Indianapolis, Indiana, USA, Sept. 2021. [Tuni.fi] [PDF]
CiThruS1
T. Niemirepo, J. Toivonen, M. Pitkänen, M. Viitanen, and J. Vanne, “Demo: CiThruS traffic scene simulator,” in Proc. IEEE Vehicular Networking Conf., Los Angeles, California, USA, Dec. 2019. [Tuni.fi] [PDF]
T. Niemirepo, J. Toivonen, M. Viitanen, and J. Vanne, “Open-source CiThruS simulation environment for real-time 360-degree traffic imaging,” in Proc. IEEE Int. Conf. Connected Vehicles and Expo, Graz, Austria, Nov. 2019. [Tuni.fi] [PDF]